



Unitree H1 通用人形机器人
技术深化
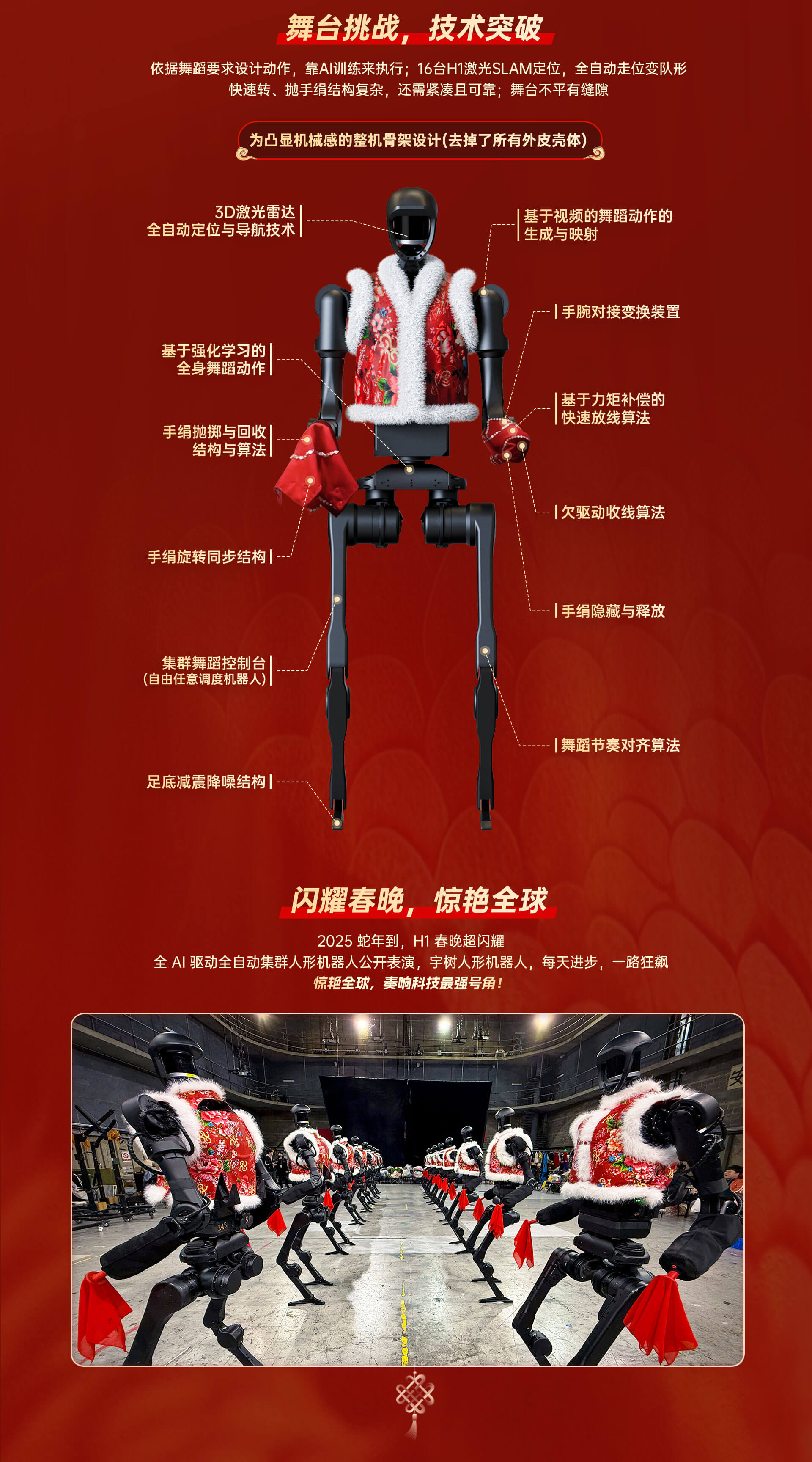
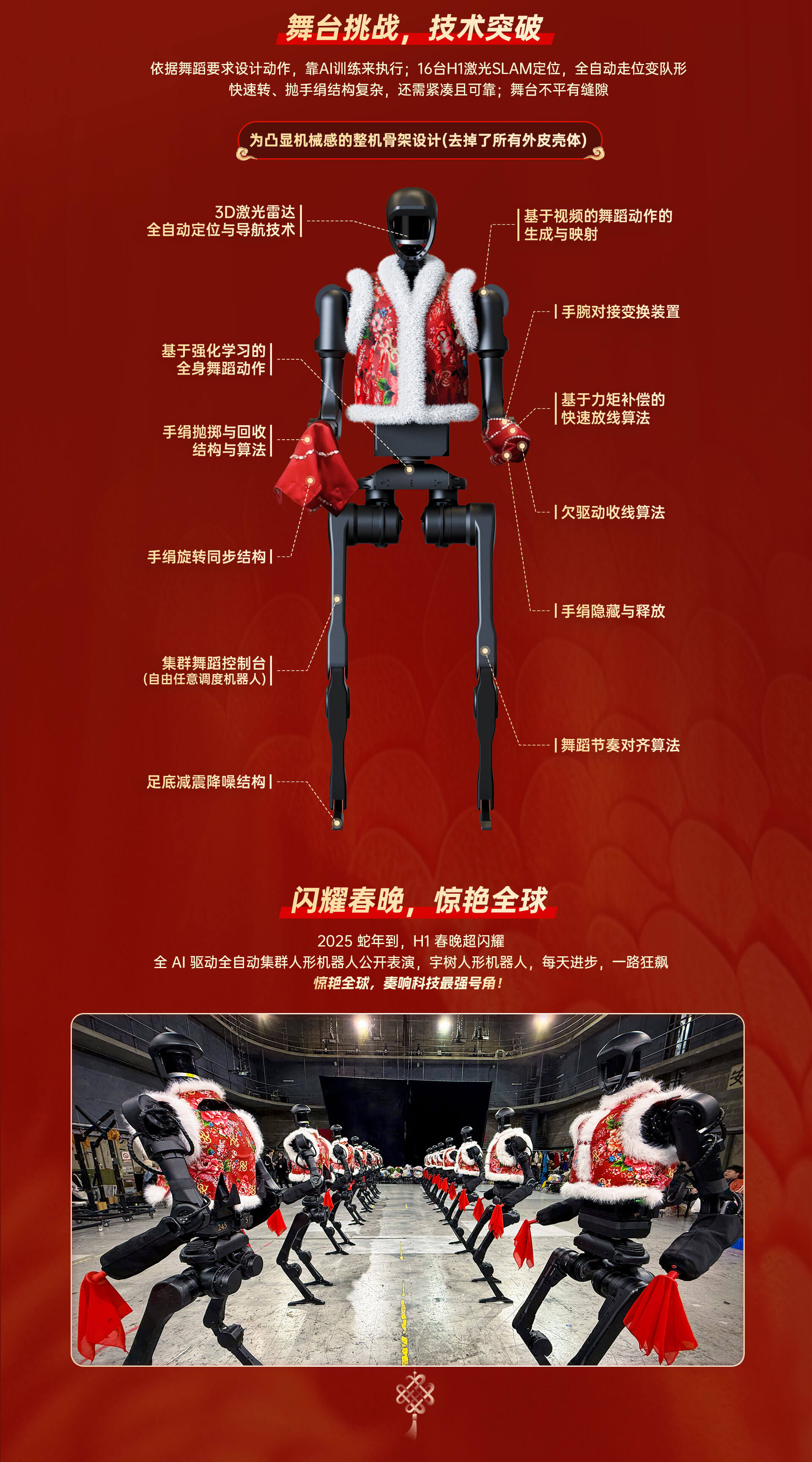
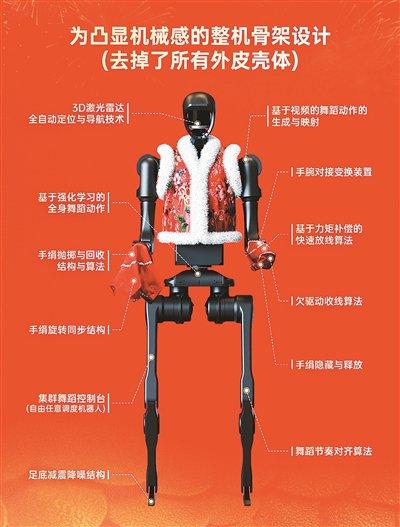
仿生架构:采用类人双足设计(12-14自由度),集成柔性关节驱动技术(可能采用串联弹性驱动器SEA)
智能中枢:内置英伟达Jetson Orin计算平台,支持ROS2系统与Isaac Sim仿真生态
感知矩阵:
双目视觉模组(全局快门摄像头+结构光)
3D力觉传感器阵列(足底压力分布检测)
九轴IMU+关节编码器闭环控制
场景演进
| 领域 | 具体应用 | 技术适配性 |
|---|---|---|
| 工业协作 | 精密仪器装配/高危环境巡检 | 毫米级末端定位+防爆设计 |
| 服务行业 | 导览接待/医疗辅具 | 自然语言交互+人体工学抓取 |
| 特种作业 | 核电站维护/地震救援 | 抗辐射强化+多模态环境感知 |
演进路线
2024原型机→2025功能扩展(工具使用模块)→2026商业部署(云端群体智能)









 发送邮件
发送邮件 售前客服
售前客服